Past Robots
Some of the bots I've built
| Copyright: | Copyright 2007 Dean Hall. All rights reserved. |
|---|---|
| Author: | Dean Hall |
| Date: | 2007/07/11 |
Here are the robots I've built (or helped build). The list is ordered from most recent to the oldest:
Snaggletooth
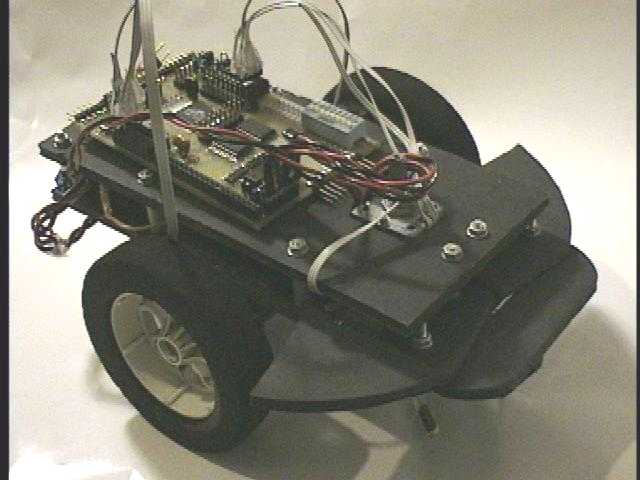
Built in 1999, Snaggletooth uses two gutted hobby servos for its drivetrain. It's chassis is made by sandwiching two foam-core boards around a Tyco 9.6 V NiCd battery pack. Foam core is strong to begin with, but the sandwich makes it even sturdier. Three bumper segments hinge in a clever way to activate two switches. Snaggletooth is also the first robot to utilize the MegaMiniBoard 103, a circuit board that I designed and had fabricated. Snaggletooth also has a geared motor in its nose that was designed to turn a sensor platform. The ultrasonic sensors never quite worked, so the platform was never completed. I got sidetracked by PyMite and never fulfilled Snaggletooth's potential.
Reno
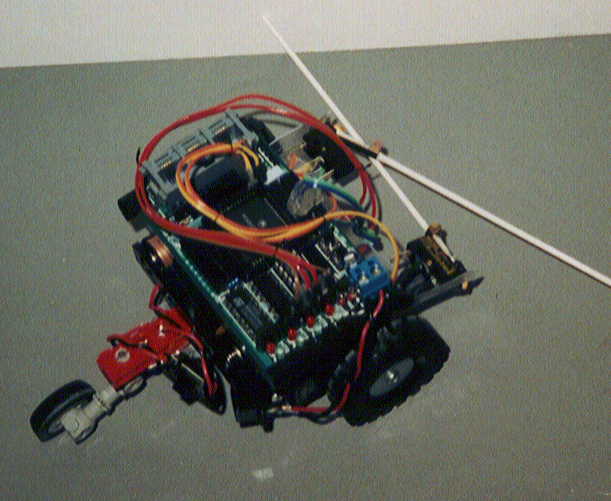
Built in 1997, Reno is the second smallest robot I've ever made. Reno uses two gutted hobby servos for its drivetrain. It's chassis IS the battery holder for the 4 AA batteries that power Reno. The trail wheel is built from Lego pieces. Two fiberglass kite spars criss-cross in front of Reno to provide bumper sensors in front. Reno uses Fred Martin's HC11E2 Miniboard for its logic. Reno was built in one weekend and had limited sensors and, thus, limited capability. I wrote a simple program to drive and turn in semi-random ways and if the bumpers were triggered, to backup and turn. That's it. Still, it was pretty impressive due to its small size.
RedWoody
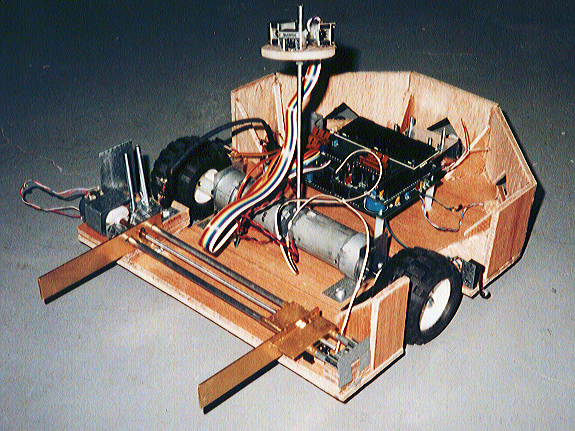
Red Woody (ca. 1995) is a college-competition robot that I helped build as a part of a three-man team. It uses two DC motors for its drivetrain and its chassis is a piece of 1/8" plywood. RedWoody has a three-panel bumper skirt in the rear and a screw-drive grabber in front. It used the HC11-based MIT 6.270 board for its logic and a custom motor driver circuit replaced the one on the 6.270 board. RedWoody was made to perform a variety of tasks for a college competition including sumo. The grabber was replaced with a clear lexan wedge during sumo competition.
Robocat

Robocat (1992-1994) is a 6-legged robot about one meter in length and legspan. Robocat was developed by various K-State engineers over a period of three years. I joined during the final year of the project and became team leader the final semester. I chose to use 4 Fred Martin Miniboards networked via SPI for the logic: one board for each pair of legs and one master board. Robocat was big, bulky and smoked motor driver chips like a bad habit.